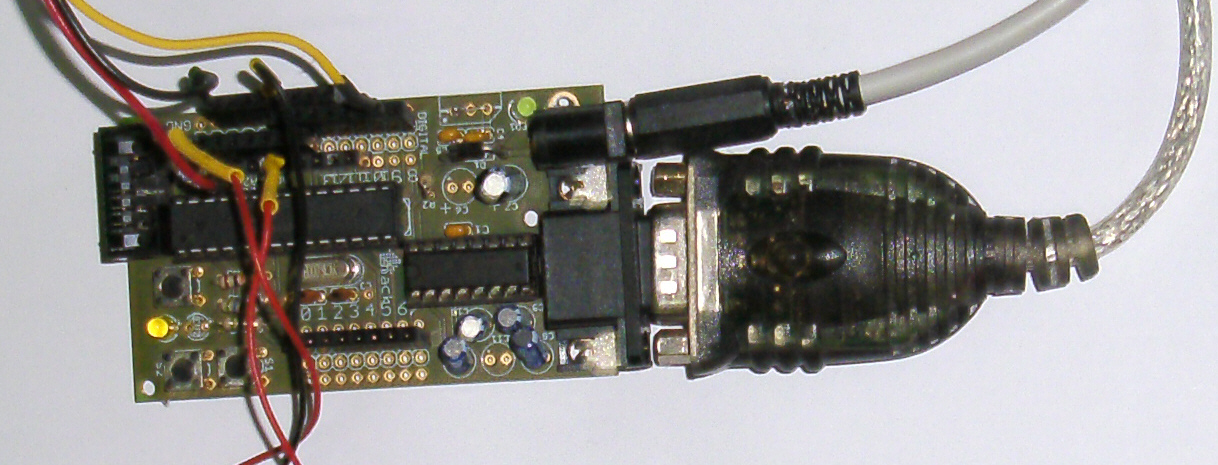
Die Kybernetik (von griechisch Steuermann) befasst sich mit Messen, Regeln und Steuern. Dieses Thema wird mathematisch behandelt. In den folgenden Internetseiten wird die Anwendung der Kybernetik auf Mikrocontoller gezeigt.Eine Mikrocontroller-Schaltung wird mit dem PC angesteuert. Es wird die serielle Schnittstelle verwendet. Man kann einen Servo ansteuern und einen Distanzsensor auslesen. Außerdem gibt es zwei Taster und eine Led. Der Sourcecode ist auf folgender Internetseite.Der Ordner mit Ausführungfähigen HMIJAR Datei gibt es hier zum Downloaden.Der Sourcecode für den Arduinocompiler: HMI2_pde.pdeIm Bild unten ist die Mikrocontroller Schaltung abgebildet.
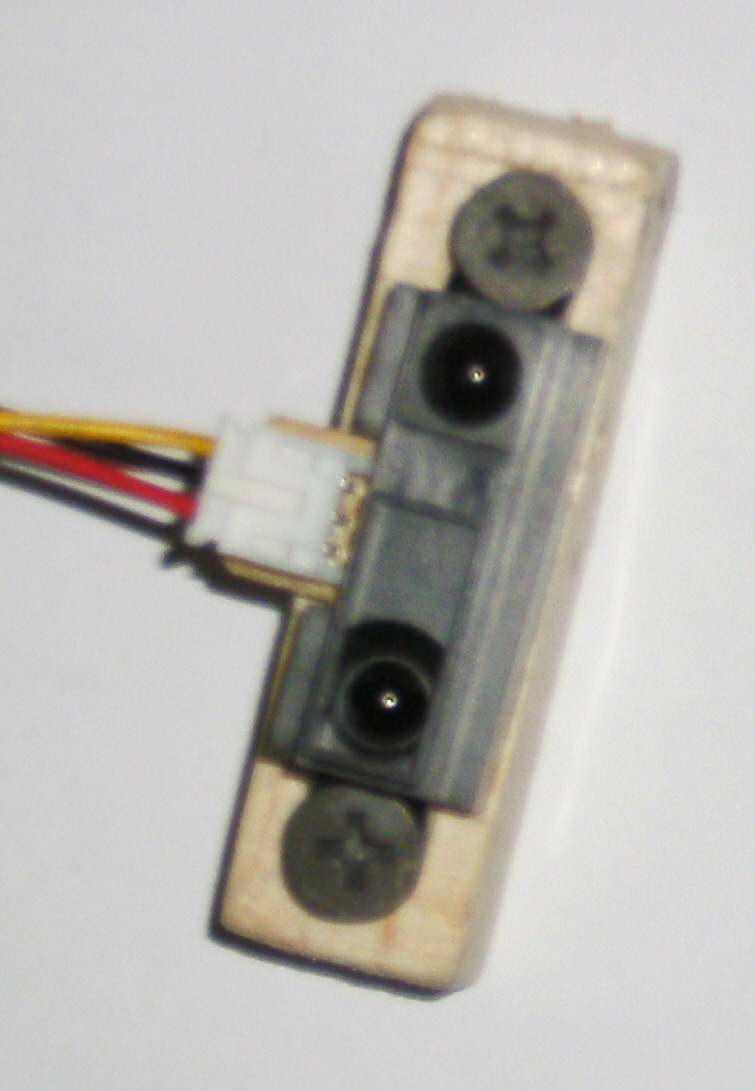
Der Sensor mißt die Entfernung zu einem Objekt und wandelt es in ein analoges Signal um. Über ein Kennfeld wird die Spannung wieder in eine Entfernung gewandelt. Das Bild unten zeigt den Sensor.
Der Servo wird mit einem Digitalausgang gesteuert. Der Digitalausgang wird mit Pulsweitenmodulation geschalten. Die Sollwerte reichen von 0 bis 120. Das entspricht einem Grad, wenn der Servomotor eine Reichweite von 120 Grad hat.

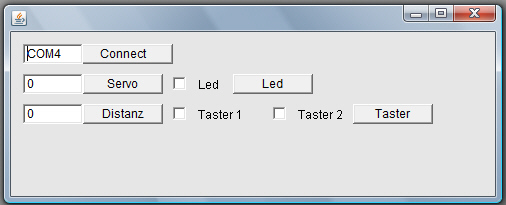
Die Bedienoberfläche dient zur Ansteuerung der Mikrocontrollerschaltung. Wenn der USB zu Seriellanschluß nicht an COM4 angeschlossen ist. Dann kann man bei dem Eingabefeld den COM Port eingeben und mit der Taste: connect ändern. Mit dem Feld vor der Taste Servo wird die Winkelstellung des Servos eingestellt. Sie liegt zwischen 0 und 120 Grad. Mit der Servotaste wird dieser Sollwert an die Mikrocontrollerschaltung ¨bermittelt. Wenn man den Schalter Distanz drückt, wird die Distanz des Sensors übermittelt. Die Checkbox vor LED ist zur Einstellung der Led zustädig. Mit Schalter Led wird der Zustand an die Mikrocontollerschaltung übermittelt. Mit Taster kann man den Zustand der Taster abfragen. Wenn ein Taster gedrückt ist, so wird die Checkbox als aktiviert angezeigt. Die Dokumentation derBedienoberfläche. Der Sourcecode der Bedienoberfläche